Diseñan robots flexibles inspirados en la biomecánica de los guepardos
Este nuevo tipo de robot flexible es capaz de moverse más rápidamente sobre superficies sólidas o en el agua que las generaciones anteriores de estas máquinas autónomas.
La locomoción robótica inspirada biológicamente es una subcategoría de este campo bastante nueva. Trata sobre el aprendizaje de conceptos de la naturaleza aplicándolos al diseño de sistemas del mundo real. Más específicamente, trata sobre hacer robots inspirados en sistemas biológicos. Y, en el caso que nos ocupa, la musa inspiradora ha sido nada más y nada menos que el guepardo o cheetah.
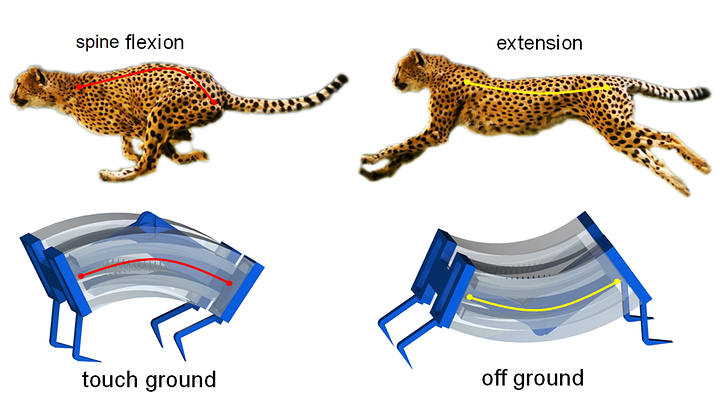
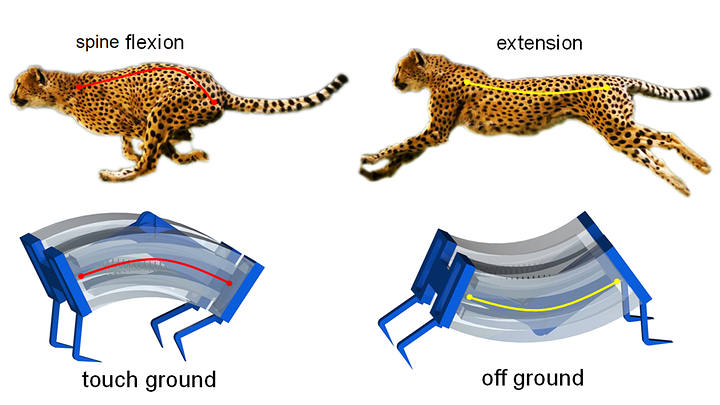
«Los guepardos son las criaturas más rápidas en tierra, y obtienen su velocidad y poder de la flexión de sus columnas vertebrales», dice en un comunicado Jie Yin, profesor asistente de ingeniería mecánica y aeroespacial en la Universidad Estatal de Carolina del Norte y autor correspondiente de un artículo sobre el nuevo robot blando (robots flexibles compuestos enteramente de materiales blandos y movidos a través de presión neumática).
«Nos inspiró el guepardo para crear un tipo de robot blando que tiene una columna vertebral “bi-estable” accionada por resorte, lo que significa que el robot tiene dos estados estables», explica Yin. «Podemos cambiar rápidamente entre estos estados bombeando aire a los canales que recubren el robot de silicona. Este cambio libera una cantidad significativa de energía, lo que permite al robot ejercer rápidamente una fuerza contra el suelo. Esto permite que el robot galope por la superficie, lo que significa que sus pies abandonan el suelo».
«Los robots blandos anteriores eran rastreadores, que permanecían en contacto con el suelo en todo momento, lo que limitaba su velocidad», precisa.
Los robots blandos más rápidos hasta ahora podían moverse a velocidades de hasta 0.8 longitudes de cuerpo por segundo en superficies planas y sólidas. La nueva clase de robots blandos, llamados LEAP (Leveraging Elastic instabilities for Amplified Performance), pueden alcanzar velocidades de hasta 2,7 longitudes de cuerpo por segundo, más de tres veces más rápido, a una frecuencia de actuación baja de aproximadamente 3Hz.
Estos nuevos robots tienen aproximadamente 7 centímetros de largo y pesan alrededor de 45 gramos, y son capaces de correr pendientes pronunciadas —lo que puede ser desafiante o imposible para los robots blandos que ejercen menos fuerza contra el suelo—.
Los investigadores también demostraron que el diseño LEAP podría mejorar la velocidad de natación de los robots blandos. Al colocar una aleta, en lugar de pies, un robot LEAP pudo nadar a una velocidad de 0,78 longitudes de cuerpo por segundo, en comparación con 0,7 longitudes de cuerpo por segundo para el anterior robot blando de natación más rápido.
«También demostramos el uso de varios robots blandos que trabajan juntos, como pinzas, para agarrar objetos», precisa Yin. «Al ajustar la fuerza ejercida por los robots, pudimos levantar objetos tan delicados como un huevo, así como objetos que pesan 10 kilogramos o más».
Los investigadores señalan que este trabajo sirve como prueba de concepto y son optimistas de que pueden modificar el diseño para hacer robots LEAP que sean aún más rápidos y potentes.
«Las aplicaciones potenciales incluyen tecnologías de búsqueda y rescate, donde la velocidad es esencial, y la robótica de fabricación industrial», concluye Yin.
El estudio ha sigo publicado en la revista Science Advances.
Fuente: NC State University. Edición: EP.